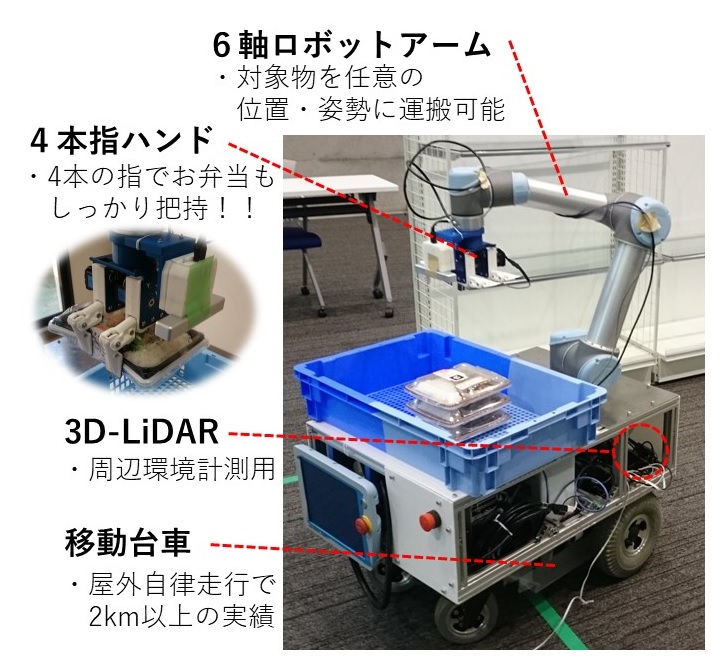
大阪市立大学知識情報処理工学研究室 大阪市立大学知識情報処理工学研究室(大阪市立大学) 概要 6自由度マニピュレータと4本指ハンドで商品を運搬 差動型2輪駆動方式の移動台車を採用することで重いバッテリやマニピュレータも搭載可能 連続稼働時間1時間 ソフトウェア開発にROS採用 商品と陳列棚に配置された二次元バーコードから位置姿勢を判定し,自動的にマニピュレーション軌道を計画・実行 メンバー 田窪 朋仁 松本 悠 内堀 佑希 ビデオ